 |
レンテック
|
〒194-0023 東京都町田市旭町3丁目14-3
TEL 042-725-6267 E-Mail : info@lentek.jp |
Neutral Maker for Electric Power Steering
|
仕組
|
|
YouTubeにテスト車両を使ったNM-1の効果の動画を載せました。 |
仕組
1.はじめに
2.構造
3.制御
4.動作
5.ご参考
1.はじめに
まず、「既存の電動パワーステアリングを運転が楽な操舵フィーリングにします」と言っても
NM-1が、積極的に、そのように機能する訳ではありません。
もともと、正しい状態の全ての車両は、内部の摩擦抵抗が大きな電動パワーステアリングが
取り付けられていなければ、先人の知恵と工夫により、運転が楽な操舵フィーリングになるように
作られています。
しかし、その電動パワーステアリングはアシストモーターと減速機で構成されていますが、
ほぼ直進するなど、操舵力が小さいときには、操舵機構を止めようとする電動パワーステアリング
内部の摩擦力が大きな割合となるため、操舵フィーリングに違和感を生じます。
そこで、NM-1は、直進時など、電動パワーステアリングが操舵アシストをしないときに
電動パワーステアリングが操舵機構の動きを止めようとする抵抗にならないようにして、
あたかも電動パワーステアリングが取り付けられていない状態(いわゆる重ステの状態)にします。
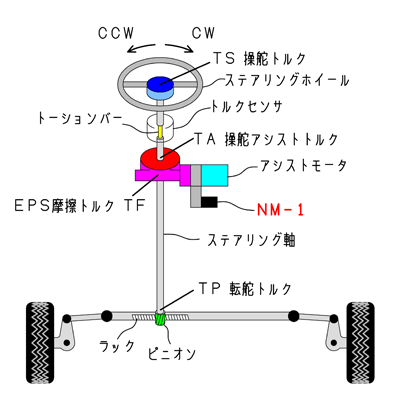
下図(左)は、車両の操舵機構と、そのコラム部に取り付けられた、ウォーム減速機とアシスト
モーターを使った電動パワーステアリングの基本構成とトルク記号の位置を説明した図です。
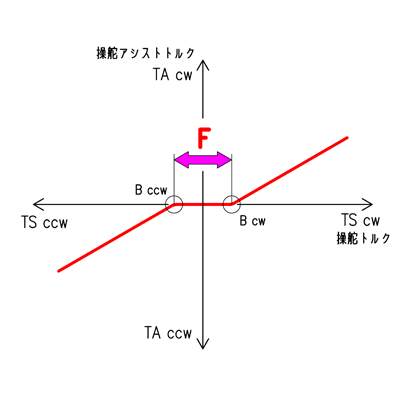
また、下図(右)は、パワーステアリング装置における操舵トルクTSと操舵アシストトルク
TAの一般的な関係を示した図です。
電動パワーステアリングは、電動パワーステアリングとステアリングホイールとの間に取り
付けられたトルクセンサにより操舵トルクTSを検出して、その大きさに応じて操舵アシストトルク
TAを加えることによって、小さな操舵トルクTSから、より大きな転舵トルクTPを発生させて、
小さな操舵力による快適な運転ができるようにします。
しかし、アシストモータを微小に制御することには限界があるので、操舵トルクTSが小さい
ところでは、どのようにしても操舵アシストできない範囲Fが生じますので、
従来構造の電動パワーステアリング装置では、アシストモーターの制御によって、
電動パワーステアリング内部の摩擦の影響を解消することは不可能です。
 |
 |
2.構造
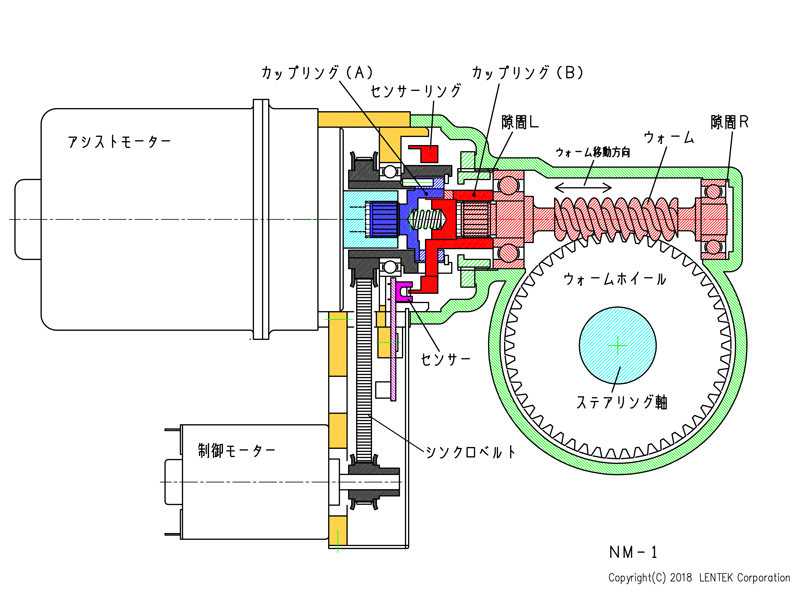
上図は、操舵アシスト機構にNM-1を取り付けた状態の断面図です。
・ NM-1は、操舵アシスト機構のウォーム減速機とアシストモーターの間に挟むように
取り付けます。
取付方法については、「取付」のページをご覧ください。
・ ウォームに軸方向のプリロードを加える押さえネジは、ウォームが軸方向に約1mmの
ストロークで移動できるように、再調整されています。
・ アシストモーター軸の回転がウォームに伝わるように、カップリング(A)、(B)で接続
されています。
カップリング(A)とカップリング(B)は、回転方向には遊びはありませんが、
軸方向には多少移動できるようになっていて、バネで互いに離れるようになっています。
そのため、カップリング(A)はアシストモーター側に常に押しつけられて軸方向に
動きませんが、カップリング(B)はバネでウォームに押しつけられているため、
常にウォームと一体となって軸方向に移動します。
・ ウォームの軸方向の位置は、カップリング(B)の外周に取り付けられたセンサーリングの
軸方向の位置変化になって、センサー(フォトインタラプタ)で検出されます。
・ 制御モーターは、シンクロベルトを介してカップリング(A)、(B)を回転させることに
よって、アシストモーター軸とウォームとを回転させます。
プーリーとシンクロベルトによる減速比は 1:3 です。
3.制御
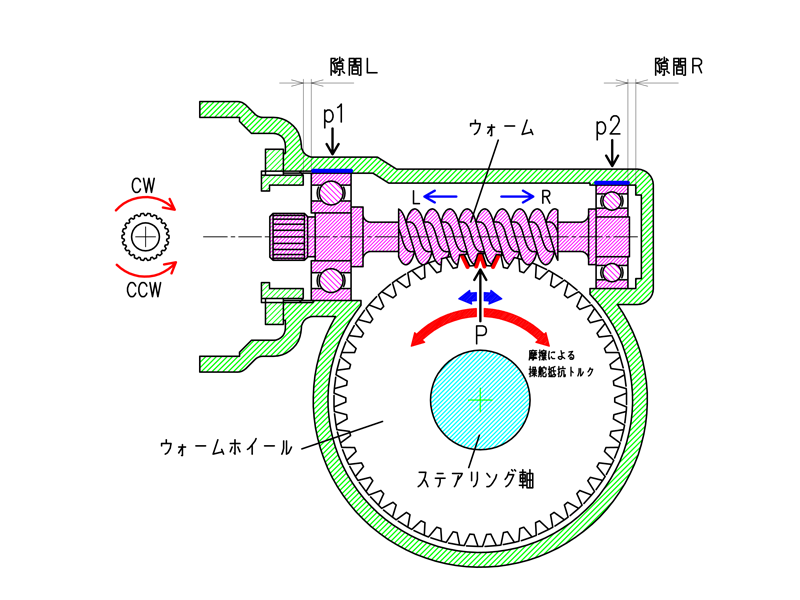
上図は、制御原理を説明するために、ウォーム減速機の要部のみを表示したものです。
ウォーム減速機はウォーム軸とウォームホイールで構成されていますが、
それらの間に常に隙間があると、タイヤの振動がステアリング軸に伝わり、
双方の歯部が衝突して歯打ち音が発生するため、二つの間に予圧(P、p1、p2)が
加わるような位置関係に取付られています。
そして、従来の電動パワーステアリングでは、ウォームを支える二つのベアリングの
間にもウォームを強く挟むように予圧を加えて ウォームが軸方向に動かないように
していますが、NM-1を取り付ける減速機では、ウォームが軸方向に動けるように
隙間(隙間L、隙間R)を設けます。
さて、このようにしたウォーム減速機においで、上図のように、ウォームの軸方向位置が
「隙間L≒ 隙間R」の状態から、ステアリング軸でウォームホイールを回すと、
摩擦力の大きさと、摩擦力の作用する方向のとの関係により、
先ず初めに、ウォームが軸方向に動いて、隙間Lまたは隙間Rが0(ゼロ)になり、
さらにステアリング軸を回すと、次に、ウォームホイールがウォームをウォームの軸を
中心として回転させるようになります。
この時のステアリング軸を回すときの摩擦による操舵抵抗トルクは、
隙間Lまたは隙間Rが0(ゼロ)になるまでは小さく、(青矢印)
さらに、ウォームをウォームの軸を中心として回転させるようになると
ステアリング軸を回すトルクは非常に大きなものになります(赤矢印)。
しかし、上記のウォーム軸の軸方向を利用して操舵アシストしないときに摩擦による
操舵抵抗トルクを小さくするのですが、例えば隙間Lと隙間Rを合わせて約1mmのなど、
隙間は小さいので、ウォームホイールの回転角としては非常に小さいです。
そこで、ウォームをウォームの軸を中心として時計方向CWまたは反時計方向CCWに
回してもウォームは螺旋に沿ってLまたはRの軸方向に移動することを利用して、
NM-1は、ウォームの軸方向位置をセンサーで検出し、その軸方向位置に応じて、
コントローラーが制御モーターを使ってウォームを回転させて、
常にウォームの軸方向位置が「隙間L≒ 隙間R」になるように制御することによって、
ウォームホイールの回転角の大きさに制限なく、摩擦による操舵抵抗が常に小さい
状態に します。
4.動作
上述「3.制御」のようにNM-1を制御することによって、電動パワーステアリングは
次のように動作します。
まず、「1.はじめに」の右図で 操舵アシストをしない操舵トルクが範囲Fのときには、
アシストモーターに電流は流れていませんから、アシストモーターによるウォームの回転を
止めようとするトルクは、NM-1の制御モーターがウォームを回そうとするトルクより小さい
ので、ウォームの軸方向位置は、NM-1の制御モーターによる制御によって、
常に、ステアリング軸を回すトルクが小さい、「隙間L≒ 隙間R」の状態にされるので、
ステアリング軸の回転方向や回転角の大きさに関わらず、
操舵機構は、操舵アシスト機構から制限されずに、自由に動ける状態になります。
また、 操舵アシストをするときには、アシストモーターの電流が徐々に増加してくると、
アシストモーターがウォームを回そうとするトルクは、NM-1の制御モータ-がウォームを
回そうとするトルクより大きくなるので、NM-1の制御モーターによるウォームの軸方向
位置の制御は不能になり、隙間Lまたは隙間Rが0(ゼロ)になると共に、
従来通り、操舵力が小さい快適な操舵が可能になります。
そして、上記のウォームの軸方向の遊びを使った動力の断続は、
摩擦クラッチのように、断続部に回転速度の差が無いので、滑らかに切り替わります。
但し、操舵アシストするときの操舵アシストトルクTAは、アシストモーターが出力している
回転方向と逆の方向に制御モータのトルクが常に作用しているため、
NM-1が取り付けられていない時に比べて、 その分だけ小さくなります。
5.ご参考
NM-1は、既存の電動パワーステアリング改造しないで後から取り付けるため、
上記のように構造が複雑になっています。
しかし、最初から電動パワーステアリングにNM-1の機能を持たせる場合は、
操舵アシストをしないときはアシストモータは使われていませんので、
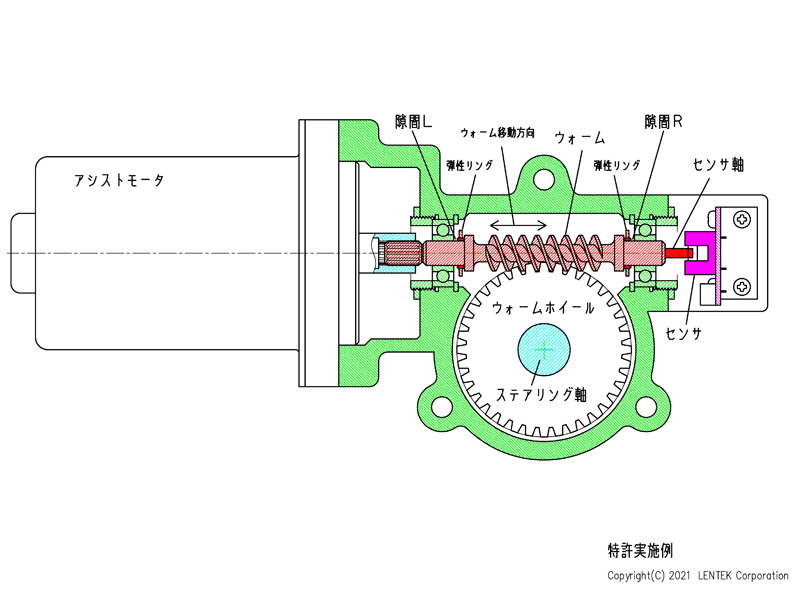
「 特許第5704491号 電動パワーステアリング装置」のように、ウォームの軸方向位置の
制御をアシストモーターに兼用させれば、下図の特許実施例)のように非常に簡単な構造
となり、従来のものに若干のコストアップで同じ機能が実現できるようになります。
また、NM-1のように、制御モーターによる操舵アシストトルクの損失もありません。
特許実施例
トヨタ86/BRZ実施例

尚、弊社の「特許第5704491号 電動パワーステアリング装置」は、これまでに類似ものが全く無い、
基本特許であるため、その特許請求の範囲は、特許実施例に示した具体的なものに限定されず、
概念的な広いものであります。
そのため、減速機、不感帯(機械的遊び)、センサーなどの、方式や配置の変更、さらに新規構造であっても、
派生特許は取得できますが、多少の変更では弊社特許を回避することは困難であることをご承知ください。