|
1、取付時のご注意
2、ステッパーモーター最大電流設定
3、マイクロステップ設定
4、ステッパーモーター接続
5、入力回路
6、出力回路
7、5V電源回路
8、Grbl Configuration 設定
(1) $4 : Step enable invert
(2) $0 : Step pulse width
9、参考資料
|
|
1,取付時のご注意
(1)接地
基板取付はArduino NANOのグランドとドライブ回路のグランドとが接続されないようにしてください。
正常時は問題ありませんが、万一のトラブル時には、フォトアイソレートの効果が高まり、より安全です。
尚、1台のオシロスコープの2本のプローブのグランド側を、NANO_GNDとドライバ側GNDのTPに
それぞれ繋ぐと、オシロスコープ内で接続された状態になります。
(2)GB-N基板との接続は全てコネクタを用いますが、使用する電線の太さにご注意ください。
・XHコネクタ(2.5mmピッチ)
付属の コンタクトSXH-001T-P0.6使用時 AWG#26~#22 ( 0.13 ~ 0.33mm^2 )
・VHコネクタ(3.96mmピッチ)
付属のコンタクトSVH-21-P1.1使用時 AWG #22~#18 ( 0.33 ~ 0.83mm^2 )
|
2,ステッパーモーター最大電流設定
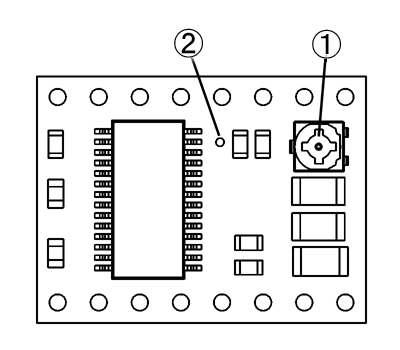 |
ステッパーモーターを接続する前に、
GB-Nの電源 VinにDC 8.2 ~ 32Vを接続してから、
Pololu 8825の左図①の可変抵抗器を回して
使用するステッパーモーターに流す最大電流 Imaxを
設定します。
Plololu 8825の回路のR2,R3は0.10Ωなので、
最大電流を設定する電圧Vrefは下記の値になります。
Vref = Imax x 0.5
この電圧の測定場所は左図①または②ですが、
② の部分をテスタで測るのは、狭いので作業性が悪く、
テストリードの先端が他の部分に触れてトラブルを起こす
可能性があります。
そこで、①の可変抵抗器の回転部で電圧を確認します。
尚、DRV8825の最大電流は2.5Aですが、ヒートシンクや
冷却ファンを追加しない場合の最大電流Imaxは1.5A/相
なので、Vrefは0.75V以下に して下さい。
|
・ステッパーモーター最大電流調整作業
作業方法は、下記のYouTube の動画を参考にして下さい。
Setting
the Current Limit on Pololu Stepper Motor Driver Carriers
実際に、この動画のように作業をしてみると、ドライバーとの接触が不安定なので、調整が困難のようです。
そこで、テスターのマイナス側だけ、動画のように、片端がミノ虫クリップで他端がICクリップ、
または両端がミノ虫クリップのケーブルを 1本用意して、GB-N基板のテストポイント(GND)に接続しておいて、
片手でテスターのプラス側のテストリードを①の可変抵抗器の上の回転部分に接触させた状態を保って、
もう一方の手でドライバーを回して調整する方法が安定して楽に作業できます。
・使用するステッパーモーターの巻線抵抗値について
DRV8825は電流駆動ですので、電源電圧と巻線抵抗値に関わらず、常に設定した最大電流に応じた電流値に
なるように動作しますが、電源電圧と巻線抵抗値で決まる導通可能最大電流値を超えることはできません。
そのため 、この導通可能最大電流値を超える設定ではマイクロステップが正常に機能しません。
また、巻線抵抗値は使用中の温度上昇によって大きくなりますので、その分、導通可能最大電流値も小さくなります。
そこで、使用中の発熱を小さくなるようにし、また、電流の立ち上がりを速くして高速ステップも可能に
なるように、使用するステッパーモーターは巻線抵抗値が小さいものを使ってください。
|
3、マイクロステップ設定
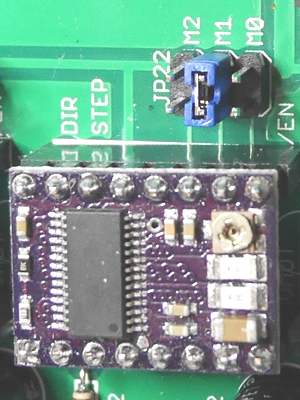 |
左図のピンヘッダーM2,M1,M0にジャンパーピンを
挿す組み合わせで、ステップモードを変更します。
|
0:ジャンパーピン無し 1:ジャンパーピン有り
|
M2
|
M1
|
M0
|
ステップ モード |
|
0
|
0
|
0
|
71%の電流によるフル・ステップ(2相励磁) |
|
0
|
0
|
1
|
1/2ステップ(1-2相励磁) |
|
0
|
1
|
0
|
1/4ステップ(W1-2相励磁) |
|
0
|
1
|
1
|
1/8ステップ(マイクロステップ) |
|
1
|
0
|
0
|
1/16ステップ(マイクロステップ) |
|
1
|
0
|
1
|
1/32ステップ(マイクロステップ) |
|
1
|
1
|
0
|
1/32ステップ(マイクロステップ) |
|
1
|
1
|
1
|
1/32ステップ(マイクロステップ) |
|
| |
|
4、ステッパーモーター接続
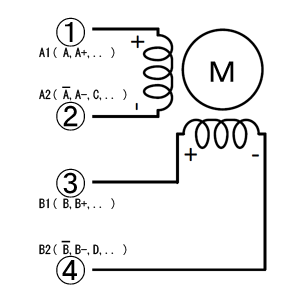 |
ステッパーモーターの巻線端子の回路図上の名称や
接続ケーブルの色などに統一された規格はありません。
それぞれの仕様書および現物で確認してください。
|
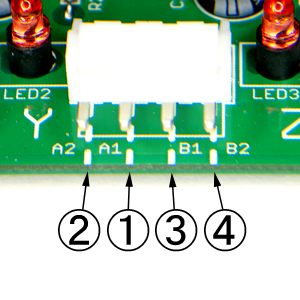 |
回路図上の巻線が左図の位置になるように接続してください。
|
|
5、入力回路
|
信号名
|
回路形式
|
|
RESET
ABORT
HOLD
RESUME
LIMIT-X
LIMIT-Y
LIMIT-Z
PROBE
|
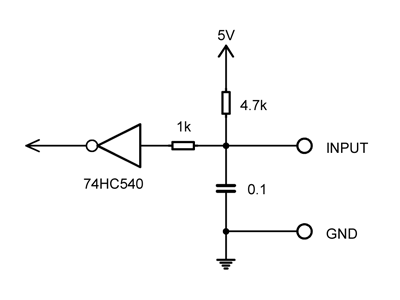
入力部にはノイズフィルタが入り、さらに、74HC540の先はフォトカプラに繋がっており、
Grbl 「Wiring
Limit Switches」での説明の「BEST」の回路を構成しています。
そのため、機械式接点のマイクロスイッチを、そのまま接続しても安定して動作します。
|
|
6、出力回路
|
信号名
|
回路形式
|
(SPINDLE)
DIR
PWM
COOLANT
AUX |
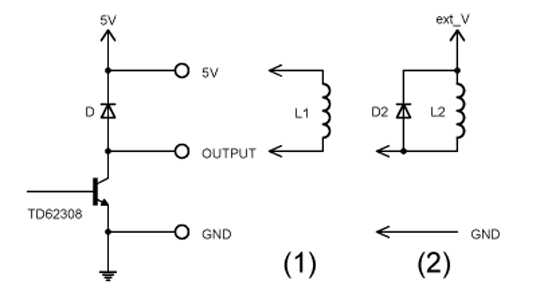
・TD62308の出力はオープンコレクタとなっており、出力電流の最大定格1. 5Aですが
余裕をみて、最大電流1. 2A以下でお使いください。また、 出力最大耐圧80Vです。
・TD62308Nの内部にはダイオードDがありますので、
(1)のように 内部の5V電源を利用してリレーなど誘導性負荷を接続する場合は問題は
ありませんが、
(2)のように外部電源(ext_V)から誘導性負荷を接続する場合は、逆起電力を吸収する
ダイオードD2を使用してください。
|
|
7、5V電源回路
|
信号名
|
回路形式
|
5V
|
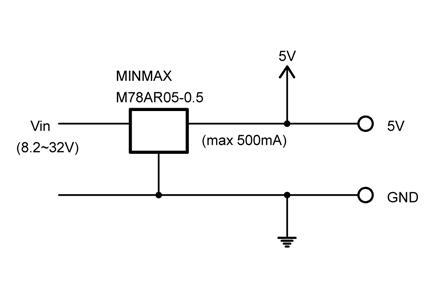
GB-N内の5Vは、入力電源Vinからスイッチングレギュレータ(MINIMAX M78AR05-0.5)を
用いて生成しており、その最大出力電流は500mAです。
そして、GB-N内の制御のために、すでに約50mAを使用しています。
そのため、5Vに接続するセンサやリレーなど、全ての消費電流の合計は、少し余裕を見て
400mAを超えないようにしてください。
|
|
8、Grbl Configuration 設定
(1) $4 : Step enable invert
DRV8825はLow to enableですが、GB-N内のフォトカプラー部で極性を反転させていますので、
Grbl のStepper enable 信号は、High to enable ( Active high )になります。
必ず、 $4=1 に変えてください。 初期値の$4=0
ではステッパーモーターは動きません。
|
(2) $0 : Step pulse width
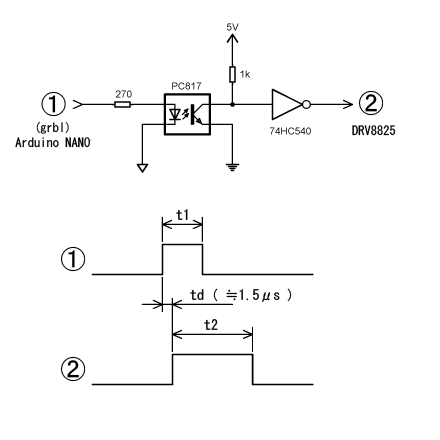 |
GB-Nでは、左図のように、Arduino Nano とDRV8825
との間にフォトカプラーがあって、そのフォトカプラーから
出力される信号波形が鈍るため、その信号を74HC540で
整形していますが、整形後のDRV8825の入力信号②の
ステップパルス幅t2は、元のArduino NANOから出力
される①のステップパルス幅t1よりも長くなります。
尚、t2のt1に対する立ち上がりの時間遅れtdは、
パルス幅に関わらず、常に約1.5μs(マイクロ秒)と
一定なので、加減速時のステップパルス立ち上がり
時間間隔への影響はありません。
|
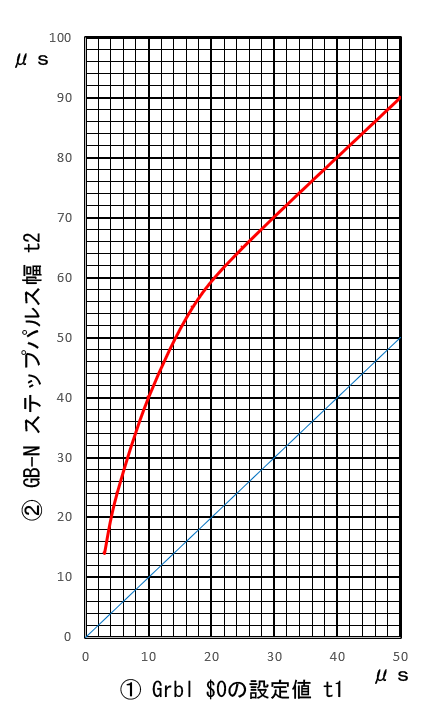 |
左図の赤線が上で説明した、①Grbl $0の設定値t1に
対する②GB-N内のステップパルス幅t2の関係です。
細い青線は、比較するためのt1=t2の線です。
横軸がArduino NANOが出力するステップパルス幅t1で、
GrblのConfiguration の$0の値で変更できます。
$0=3から$0=255まで設定できます。
縦軸がGB-N内で実際にDRV8825に入力される
ステップパルス幅t2です。
t2とt1の差は、t1が大きくなると徐々に大きくなりますが、
t1が20を超えると常にt2=(t1+40)usになります。
Grblのデフォルトの$0=10では、t2=40usです。
使用上に不都合が無ければ変更は不要です。
変更する場合は、左図のように変化するものである
ことをご承知ください。
尚、原因は分かりませんが、$0=130以上では、
t1が設定した値の通りになりませんので、
設定しないことをお勧めします。
|
|
9、参考資料
|
